Progetto LUKAS: strade più sicure ed efficienti se le auto sono connesse tra loro

La connettività ha reso il traffico più sicuro ed efficiente. È quanto emerge dal progetto di ricerca LUKAS, acronimo di “Lokales Umfeldmodell für das kooperative, automatisierte Fahren in komplexen Verkehrssituationen” (Modello di ambiente locale per la guida autonoma cooperativa in situazioni di traffico complesse), realizzato da Bosch in collaborazione con Mercedes, Nokia, IT-Designers, InMach, Università di Ulm e Università di Duisburg-Essen.
La trasformazione digitale, l’urbanizzazione e l’automazione crescenti nonché la necessità di una maggiore efficienza energetica e di azioni per il clima sono sfide impegnative che il settore della mobilità si trova ad affrontare. La comunicazione affidabile tra traffico autonomo e non autonomo, così come all’interno dell’infrastruttura, svolge un ruolo fondamentale in tale contesto.
Dati dell’ambiente
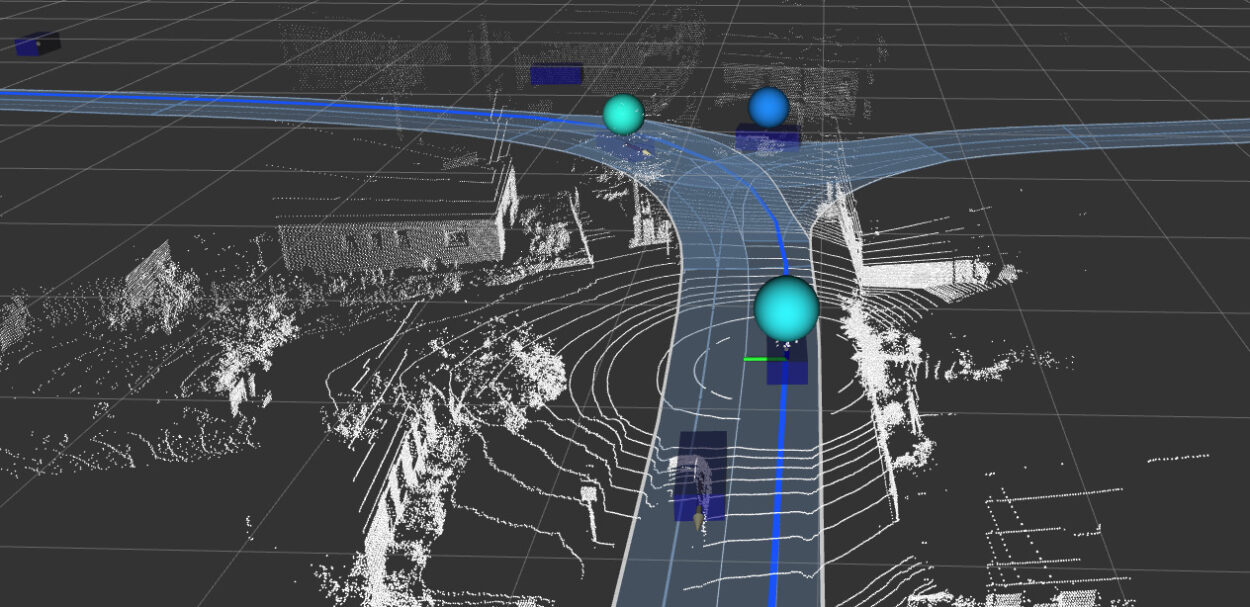
Per aumentare l’efficienza e la sicurezza nei futuri scenari di traffico misto in ambiente urbano, il progetto di ricerca LUKAS utilizza tutte le informazioni disponibili nell’ambiente locale, per esempio le informazioni provenienti dai sensori delle infrastrutture, dalle auto e dai veicoli commerciali connessi e da dispositivi mobili come gli smartphone utilizzati da pedoni e ciclisti. Il sistema fornisce dati anonimi relativi agli utenti della strada e agli oggetti fissi, compresi indicatori come la posizione, l’estensione ed eventualmente la velocità e la direzione di movimento. Le informazioni pre-elaborate dai sensori vengono trasmesse a un server edge che è collegato direttamente alla rete 5G in prossimità dell’incrocio e che provvede alla trasmissione dei dati con un ritardo minimo.

Un algoritmo di fusione sul server edge è in grado di creare un modello completo dell’ambiente locale e di utilizzarlo come base per pianificare le manovre degli utenti della strada connessi. Le informazioni sugli oggetti fornite dal modello ambientale del server vengono restituite agli utenti della strada. In questo modo la loro visione si estende ad aree che non potrebbero rilevare autonomamente. “Il server edge utilizza anche metodi di intelligenza artificiale (AI) per calcolare manovre cooperative ottimizzate e quindi inviare istruzioni agli utenti connessi. Questo approccio consente di aumentare l’efficienza energetica complessiva dello scenario di traffico e la sicurezza degli utenti della strada, soprattutto di quelli più vulnerabili“, ha spiegato Rüdiger Walter Henn, responsabile del progetto LUKAS per Bosch.
Installazione del progetto LUKAS
Per eseguire i test, che si sono svolti in un’area pubblica nel quartiere di Ulm-Lehr, il consorzio ha utilizzato un’installazione pilota finanziata dalla città di Ulm e gestita dall’Università di Ulm. Nell’area selezionata è presente un incrocio tra un tratto in curva di una strada con diritto di precedenza e una strada laterale. Gli edifici circostanti nascondono il diritto di precedenza, rendendo questa situazione stradale particolarmente interessante per gli scenari di traffico reali. “Questa installazione ci offre eccellenti opportunità di utilizzare situazioni di traffico reali per testare gli approcci che abbiamo studiato e sviluppato e trarre rapidamente conclusioni sulla loro idoneità all’uso pratico”, ha spiegato Michael Buchholz, a capo dei gruppi di ricerca sulla mobilità elettrica e sulla guida e infrastruttura connessa presso l’Istituto di misurazione, controllo e microtecnologia dell’Università di Ulm e responsabile dell’installazione pilota.
I lampioni in prossimità dell’incrocio sono dotati di sensori video, lidar e radar per rilevare e classificare il traffico. Le informazioni sull’oggetto vengono inviate al server edge tramite una rete 5G dal partner Nokia. Per ragioni di protezione dei dati, le persone e i veicoli non sono identificabili. Il server edge ospita il modello ambientale globale, diverse varianti valutate della pianificazione delle manovre cooperative e un modulo di segnalazione per pedoni e ciclisti.
Uno sguardo su un (possibile) futuro
Per illustrare i casi d’uso cooperativi nel traffico misto, Bosch, Mercedes e l’Università di Ulm utilizzano autovetture connesse e parzialmente autonome. InMach fornisce un prototipo connesso di spazzatrice stradale. Le speciali app per smartphone di IT-Designers GmbH e Nokia permettono di collegare pedoni e ciclisti all’edge server. IT-Designers raccoglie i dati utilizzando un drone con videocamera per facilitare la simulazione degli scenari di traffico, mentre l’Università di Duisburg-Essen supporta il progetto con simulazioni dei flussi di traffico.
In tutti i casi d’uso testati è stato possibile verificare i vantaggi dell’approccio LUKAS in termini di maggiore efficienza e sicurezza del traffico. Osservando i risultati delle simulazioni degli algoritmi di pianificazione basati sull’intelligenza artificiale, i ricercatori prevedono un aumento significativo dei flussi di traffico. Gli studi condotti da Mercedes dimostrano una significativa riduzione del consumo di carburante e una diminuzione del tempo necessario per attraversare l’incrocio rispetto alla guida tradizionale. Ritardando il traffico in arrivo per consentire il comportamento cooperativo, gli utenti della strada che sorpassano i veicoli fermi e gli utenti vulnerabili che attraversano la strada sono protetti nelle aree con visibilità limitata. Grazie alla nuova tecnologia e alla pianificazione di scenari cooperativi, gli utenti della strada riconoscono per tempo quale strategia di guida consentirà loro di comportarsi in modo sicuro ed efficiente.